NAK NEK vazar ARM egy szelektív fémdetektor LCD képernyővel és a fémek elosztásával 16 csoportba. Ez a Quasar fémdetektor projekt folytatása. Az új áramkör erősebb ARM32 mikrokontrollert használ, és további funkciókat ad hozzá.
A Quasar ARM fémdetektor műszaki jellemzői:
· Működési frekvencia – 4-16 kHz;
· Jelzés - több tónusú audio és vizuális LCD képernyő.
· Tápellátás – 12 volt.
· Egy 5 kopejkás Szovjetunió érme (23 cm-es DD tekercssel) észlelési mélysége 30 cm.
Ez a fémdetektor rendelkezik közepes nehézségi szint , DIY lejátszáshoz! Csak tapasztalattal rendelkezők vállalhatják a gyártását. Vannak SMD komponensek (ami kezdőknek okozhat nehézségeket), programozható mikrokontroller, IB fémdetektorhoz egy tekercs, ami szintén sok gondot okoz, ha nincs megfelelő tapasztalat. De ha mindezek az árnyalatok nem zavarják, akkor a készülék kellemesen fog tetszeni. Emellett nagy bónusz az elkészítése során, hogy sok vitát folytatnak az interneten, ahol már sok kérdést megvitattak!
Fejlesztések az új Quasar AWS-ben:
· Eltávolították a külső ADC-t, amelyet nehéz volt megvásárolni.
· Fokozott érzékenység.
· Frekvencia tartomány 4-16 kHz.
· Jobb hangminőség.
· Három profil hozzáadva a beállítások mentéséhez és visszaállításához (A, B, C).
· Elektronikus kompenzáció került bevezetésre a tekercs kiegyensúlyozatlanságának megszüntetésére.
A Quasar ARM fémdetektor sémája
 Letöltés diagram és alkatrészlista a Kvazar ARM fémdetektorhoz -
Letöltés diagram és alkatrészlista a Kvazar ARM fémdetektorhoz -
A Quasar AWP fémdetektor nyomtatott áramköri lapja
 Archívum nyomtatott áramköri kvazár munkaállomással -
Archívum nyomtatott áramköri kvazár munkaállomással -
Képernyővel ellátott tábla Quasar AWP fémdetektorhoz
 A Quasar AWP fémdetektorhoz RC1602A képernyőket használhat HD44780 vagy KS0066 vezérlővel.
A Quasar AWP fémdetektorhoz RC1602A képernyőket használhat HD44780 vagy KS0066 vezérlővel.
A Quasar AWP fémdetektor táblájának elkészítése után fel kell villannia a mikrokontrollert. A mikrokontroller programozásához használhatja az st link v2 programozót (ez a webáruházakban kapható), de akinek van COM portja (manapság nagy luxus), az egy egyszerű programozót használhat a számítógépén ennek megfelelően. diagram (A diagram innen származik: http://forum.cxem.net/index.php?showtopic=144107&st=20):
Firmware a Quazar ARM 2.1.2 fémdetektorhoz (legfrissebb a cikk írásakor) –
Archívum a Quasar ARM fémdetektor firmware-ével és a változtatások leírásával -
A fémdetektor felvillantása után el kell végezni a próbaüzemeket és meg kell kezdeni a keresőtekercs gyártását.
A Quasar ARM fémdetektor kezelési útmutatója -
Ezt a videós leírást találtam a Kvaraz AVR fémdetektor blokkjának és tekercsének gyártási folyamatáról:
1. rész, a táblával kezdve
5. rész, folytassuk a Quasar fémdetektor tekercsének elkészítését
12. rész, kiegészítés és finomhangolás
Következtetés: A Quasar ARM egy tisztességes középszintű fémdetektor. Ha helyesen gyártják, akkor jól versenyezhet a márkás analógokkal. A fémdetektor fő célja az érmék keresése. Az áramkör nem tartalmaz drága és szűkös alkatrészeket, de számos technológiai árnyalattal rendelkezik, és igényes a tekercsgyártás minőségére. Ennek megismétléséhez ajánlatos hasonló termékekben „van” tapasztalat, különben csalódást okozhat az eredmény!
A cikk írásakor használt anyagok:
· Forum Scheme.net - http://forum.cxem.net/index.php?showtopic=144107&st=0
(a rendszer frissítése)
Fémdetektorkvazár-KAR, napjaink egyik legnépszerűbb digitális eszköze.
Ez nagyon jó, és ezt ellenőrizheti, ha beírja a megfelelő nevet egy internetes keresésbe vagy a YouTube-on...
És ennek ellenére természetesen vannak gyenge pontjai a készüléknek, amit modernizálni fogunk.
Kezdjük az eszköz diagrammal.

Kezdjük az eszközgenerátor, vagy inkább a Tx meghajtó áramkör frissítésével.

A mikrokontroller jele az R17 1 kOhm ellenálláson keresztül egy BC846 tranzisztorokon készült szintillesztő áramkörbe kerül, majd a jel a Mosfett „driver”-hez hasonló áramkörbe kerül (az IRF7105 térhatású tranzisztorainak nyitását és zárását vezérli). összeszerelés)…
Úgy tűnik, minden rendben van, minden működik, elégedett felhasználókat látunk. A probléma azonban az, hogy az alkatrészpiac nem mindig kínál jó és olcsó elemeket. Ez gyakran megbízhatatlan Kína, és ami a legfontosabb, ha olcsó eszközt vásárol (olcsóbb, mint a versenytársak), akkor ez olcsó alkatrészeket jelent.
Tehát tapasztalataim szerint ez az egység már háromszor meghibásodott. Cserélni kellett a BC846 tranzisztort, és eljött az IRF7105 cseréje is.
Több mint egy tucat elem működik ebben az egységben, ami azt jelenti, hogy a 10 elem közül legalább egy meghibásodása tele van a teljes eszköz meghibásodásával.
Mit kell tenni?
Több lehetőség is van. Az egyik az, hogy az R17 jelét a 74NS14 mikroáramkör elemen keresztül továbbítsák. Így működnek az olyan eszközök, mint a Groza vagy az Anker és mások. Sok éve dolgoznak, és nincs rá panasz.
De mennyire indokolt ez? Mi van, ha ez nem egészen helyes lépés?!
Nos... miután átnéztem az interneten található információkat, jó barátaim segítségével találtam egy speciális mikroáramkört - TC4420 (lehet, hogy hasonló).
Ez a SOIC-8 csomagban található mikrochip már tartalmaz egy meghajtót és egy terepi szerelvényt is akár 1,5 A terheléshez!
Az eredmény 10 rész helyett 1 mikrodarab. Minden ötletes egyszerű!

A módosított kaszkád sémája.
Természetesen nem állhat meg itt, és fájdalommentesen dobhatja ki a C4, VD2, VD3 elemeket, és cserélheti az R2 ellenállást (10 Ohm) elfogadható árammal a Tx tekercsben (1-2 Ohm-ig). Akkor megnő az áram a tekercsben...
Az R2-vel végzett kísérletek azonban azt mutatták, hogy az eszköz érzékenysége, amikor a Tx tekercsáram 50 mA-ről 80 mA-re változik, mindössze 3-5 cm-rel nő 5 kopekkos Szovjetunió érménként. De a készülék falánksága egyre nő, ami azt jelenti, hogy az akkumulátorok gyorsabban lemerülnek...

Sokat kell itt gondolkodni. Először is, az U1A vevőerősítő érzékeny része mindkét bemeneten (2. és 3. láb) mindenre érzékeny. Tehát a jel minőségének (referenciafeszültségnek) tökéletesnek kell lennie.
De mint mindig, most sem minden olyan tökéletes, mint szeretnénk. A rádióelemek piacán gyakran az MCP6022 mikroáramkör Kínában készül, és kétes minőségű. A következő „tüneteket” mutatja: zaj az U1B kimeneten, telítésig (+3,3 Volt). Sőt, a készülék tökéletesen működik, ha legfeljebb 30 perctől 1,5 óráig működik. A károk pedig a hosszú távú működés során keletkeznek.
Minden a helyére kerül, ha bemelegíted a mikroáramkört (pl. forrasztópákával 8 lábú MCP6022 (+3,3 Volt). De ez csak átmeneti megváltás, mert
A probléma megoldása a kínai MCP6022 mikroáramkör lecserélése AD8606-ra (amerikai Analog Devices cég), vagy valódi Microchip MCP6022-re.
A második probléma ezzel az egységgel a 10 µF-os SMD kondenzátorok. Amelyek gyakran olyan rosszak, hogy még ezt a feszültséget (1,65 Volt) sem tudják megtartani, és idővel vagy azonnal kirepülnek, egyszerűen ellenállássá alakulnak.
A megoldás az SMD tantál polárkondenzátorok szükséges méretű cseréje.

A készülék „helyes” szenzorának változtatása még csak folyamatban van... A többi már tesztelve és működik.
És végül... figyelmen kívül hagyható apró változtatások az áramkörben.
A programozáshoz szükséges felesleges csomópontokat eltávolíthatja a táblákról, így csak egy marad (én SWD-t használok), valamint egy áramkör az LCD képernyő kontrasztjának beállításához - ha OLED képernyőket használ.


Fotók - a változások előtt és után.
Sok sikert mindenkinek a hangszerkészítéshez és a kereséshez. Engedd a te A Quaza-ARM menő leleteket és hangulatot hoz neked!

Alekszandr Szerbin (Kharkov)
Fémdetektor « KVAZÁR- KAR", egy modern digitális IB fémdetektor, egy meglehetősen új és modern STM32 vezérlőre szerelve.
Ennek számos hasznos funkciója van és menü eszköz beállítások.
Ami nagyon szép, az a működési frekvenciák széles skálája (egy közül választhat, a frekvenciák automatikus kiválasztása a keresőérzékelővel való rezonáláshoz stb.), valamint 8 felhasználói profil (melyek elmenthetők vagy előhívhatók a menü).
A digitális fémdetektorokkal szembeni szkepticizmusom ellenére az első használat után gyakorlatilag „beleszerettem”. Amit sok márkás készülékről nem tudok elmondani!!!
A Quasar AWP fémdetektor műszaki jellemzői DD-20 cm-es keresőérzékelővel:
25 mm átmérőjű érme (köszörült)…. 35 cm-ig
Sisak……………………………………….. 1,2 m-ig
Maximum ……………………………. 1,7 m-ig
Hangjelzés választható...... 2 vagy több hang közül
VDI vizuális jelzés………….. igen
Maszkok felszerelése fémtípusokra...... igen
Működési elv……………………….. IB (induktív egyensúly)
Érzékelő átmérője………………………… 15-30 cm
(választható)
Működési frekvencia tartomány……………. 6-20 kHz
(firmware-től függően)
Tápfeszültség………………… 3,7-5,5 Volt
Áramfelvétel……………………… kb 100-180 mA (beállításoktól függően)
Íme az összeszerelt készüléklap nézete (az alábbi kép).
...nem akartam táblát készíteni, mint más dolgokban, nem akartam teljesen kész készüléket vásárolni, ezért egy üres tábla vásárlására szorítkoztam. Ezt a címet a spamrobotok ellen védjük A megtekintéséhez engedélyeznie kell a JavaScriptet. (beforrasztott firmware vezérlővel). Szerencsére ez most nagyon is lehetséges és isteni áron.
Az eszköz kapcsolási rajza nagyon egyszerűnek bizonyult, és úgy döntöttem, hogy magam szerelem össze és konfigurálom ezt az eszközt. Ehhez minden szükséges felszerelésem megvolt.
Az összeszerelt tábla így nézett ki...


Az összeszerelést és a beállítást néhány kedvesen megadott fájl megkönnyítette Ez az e-mail cím védett a spamrobotok ellen, engedélyezni kell a JavaScript használatát a megtekintéséhez. ...
Mindezt, valamint a Kvazar-ARM detektor utasításait letöltheti.
Egy rövid videó az érzékelő üzemmódjairól, működéséről és konfigurációjáról:
Nos, most a benyomásaimról:
Az összeszerelés rövid és nagyon kellemes volt, mivel a tábla a legmagasabb szinten készült (maszk, alkatrész- és ülésszámozás).
A készülék azonnal elindult, és engedelmeskedett a billentyűzet parancsainak;
A 20 cm-es DD szenzor gyártása után a készülék (vagy inkább szoftveres képességei) segített a szenzor beállításában...
20 cm-es szenzorral jó eredményeket és célkiválasztást mutatott;
Zárt műanyag tokban, merítési körülmények között tesztelve (mellkasig).
Magabiztos munka a vízben és a célpont kiválasztása.
Íme egy rövid videó a kilépésemről.
Nos, befejezésül azt szeretném mondani: "Még nem tartottam a legjobb hazai készüléket a kezemben!"
Még nem volt alkalmam használni a Quasar AWP-t sós és tengeri körülmények között (és kétségeim vannak, amíg nem próbálom ki személyesen)…
Nos, ezekre a célokra (tengeri keresés) egy másik készüléket szerelek össze magamnak. Nos, azoknak, akik szeretnének egy ilyen készüléket, de félnek maguk összeszerelni, mindig készen állok a segítségére. Ez az e-mail cím a spamrobotok elleni védelem alatt áll, a megtekintéséhez engedélyezni kell a JavaScriptet. .
Fémdetektor KVAZÁR- KAR kellemes asszisztens lesz a keresésben. Boldog keresést!
Alekszandr Szerbin (Kharkov)
A Quasar fémdetektor további fejlesztése egy hasonló áramkör volt, amely az STM32 család mikrokontrollerére épült. Az eszközt elnevezték Quasar ARM.

Jellemzőit tekintve az új készülék közel áll az AVR-en található változathoz. Főbb különbségek:
- Az érzékenység kissé megnőtt.
- Maximális működési frekvencia ~ 21 kHz.
- Továbbfejlesztett hangzás.
- Bizonyos határokon belül lehetséges az érzékelő kiegyensúlyozatlanságának elektronikus kompenzálása.
Nyomtatott áramköri lap formátum Sprint elrendezés 6: QuasarARM_PCB.zip
- A dolgozók kérésére megszüntették az úgynevezett hangkésleltetést.
- Továbbfejlesztett célelválasztás.
- A „hosszú” beszédhang lerövidült.
- A simítás három szintje került bevezetésre ("Sima" menüpont).
- A „Bal” gomb a Maszkolás/Minden fém mód közötti váltáshoz van hozzárendelve. A háttérvilágítás bekapcsolása ennek megfelelően kikerül a menüből.
- Helyesbítések.
Firmware verzió 2.5.2
- A feldolgozási algoritmus jelentős része átírásra került.
- Kidobott hülyeség.
- Az automatikus talajbeállítás megszűnt.
- Bevezetésre került a hangjáték "Időtartam" paramétere.
Firmware verzió 2.4.0
- A feldolgozási algoritmus megváltozott.
- Az alternatív VDI mód eltávolítva.
- Helyesbítések.
- Globális feldolgozási hiba észlelhető – az adatok egy része nem került feldolgozásra. Újraírva.
Firmware verzió 2.3.1
- Fix kalibráció ferrithez és talajhoz
- Javított menüművelet (voltmérő)
Firmware verzió 2.3.0
- A válaszszint egyszerűsített rajza (csúszka eltávolítva)
- Hozzáadott fokozat szimbólum
- Hozzáadott kőmaszk (skálás végmaszk)
- Az automatikus talajbeállítás megbízhatósági felméréssel külön feladatban szerepel
- Hiba történt – a talaj automatikus beállítása befolyásolja a ferrit kalibrációt és a talajkalibrációt
- A menü beállítása megtörtént.
- Megjelenítési műtermékek eltávolítva.
- Pinpointer átírva.
- A talajkiegyenlítés párbeszédablakban megjelent egy M paraméter (nagyság), melynek értékével megbecsülhető a talaj „nehézsége”.
- A ferrit 0 kalibrációhoz és a talajkalibrációhoz használt algoritmust pontosabbra cserélték.
- Kisebb javítások.
- Az algoritmus finomítása.
- Helyesbítések.
- A hangjáték kissé megváltozott.
- Kisebb javítások.
- A rosszat eltávolítják, a jót meghagyják.
- Fix hang.
- A VDI definíció megbízhatóbbá vált (?).
- A küszöbhang „fordított”.
- Hibák javítva.
- A tűmutató megváltozott.
Firmware verzió 2.2.6
- Hang újraírva
Firmware verzió 2.2.5
- Az észlelési algoritmus a 2.2.2-es verziónak megfelelően helyreállt
- Kissé módosított feldolgozás.
- Kisebb javítások.
- A menün HW opciók van egy új paraméter Nyereség(Nyereség). Ez nem működési beállítás, hanem a bemeneti erősítőben lévő forrasztóellenállások analógja.
- Változások a feldolgozási algoritmusban a zajvédelem növelésére irányultak.
- A menü kissé megváltozott.
- Kisebb hibák javítva.
- Az FM adó vezérlésének hibáit kijavították.
Firmware verzió 2.2.0 .
- FM adó támogatás.
- Kijavítottuk a képernyő háttérvilágításának hibáját.
- Kisebb javítások.
- PWM (PWM) hozzáadva a tűhöz PA3 vezérlő (a kísérletezni szeretőknek. Menüpont "Felhasználói PWM" .
- Kisebb javítások.
- A Pinpointer beállítása megtörtént.
- Kisebb javítások.
- A signográf megjelenítési késleltetése (lag) állítható lett (menüpont "Lag signograph" ).
- A gombok működése megtörtént.
- Kisebb javítások.
- A signograph megjelenítési késleltetése megnőtt.
- A frekvenciarés a VDI = 0 tartományban megnőtt.
- Eltávolította a beállítás hatását "LF Boost" a küszöbhangon és az overdrive hangon.
- A tűmutató megváltozott.
- A főképernyőn hozzáadva a végfok áramfelvételének megjelenítését.
- Kisebb javítások.
- A pinpointer ismét át lett írva (a küszöbértéket manuálisan állítottuk be, a VDI-érzékelés stabilabb, a hangvezérlés módosult).
- Kozmetikai javítások.
- A tűmutatót átírták (az opció meglehetősen kísérleti jellegű - adaptív küszöbértékkel és VDI jelzéssel).
- A gombok háttérvilágítás miatti késleltetése megszűnt.
- Hozzáadták a hangszínjátszás alacsony frekvenciájú részének hangerejének megváltoztatásának lehetőségét.
- Kozmetikai változások.
- Az egyensúlyhiány-kompenzátor algoritmusát beállítottuk.
- Kisebb javítások.
- Voltmérő beállítva.
- Kisebb javítások.
- A Pinpointer beállítása megtörtént.
- A küszöbhang átírásra került.
- Továbbfejlesztett hangzás.
- Az első hangátviteli séma módosult.
- Kisebb javítások.
- Megjelenítési mód hozzáadva VDI nagy számban.
- Kisebb javítások.
- Tűpontos módban kulcskiosztás BalÉs Jobb helyet cseréltek.
- A dolgozók számos kérése miatt kijelzős mód VDI digitális formában.
- Az érzékenység a firmware-ek közötti átlagos értékre van állítva 2.0.4 És 2.0.6 .
- A tűmutató érzékenysége (küszöbértéke) közvetlenül a tűmutató módtól külön állítható be. Billentyű hozzárendelés ebben a módban:
- Fel- a küszöb növelése és a tűmutató visszaállítása
- Le- a küszöb csökkentése és a tűmutató visszaállítása
- Jobb- a tűmutató visszaállítása
- A többi gomb a tűmutató módból való kilépésre szolgál
- Fokozott tűpont érzékenység.
- A maximális érzékenység visszaállt a 2.0.2b firmware-szintre.
- A kiegyensúlyozatlanság-kompenzátor vezérlésének hibáit kijavították.
- A 2.0.2 betta verzióhoz hasonló, javított hibákkal (néhány).
- A talajegyensúly párbeszédpanel beállítása megtörtént.
- A kompenzátor át lett írva.
- Kisebb javítások.
- A jelzõrajz kiigazításra került.
- A feldolgozást a zajvédelem javítása érdekében módosították.
- A menüben hozzáadtuk a feldolgozási módok váltásának lehetőségét Feldolgozás.
- A hang javítva és javítva.
- Az algoritmus kiigazításra került.
- A diagnosztika befejeződött.
- Hang beállítva.
- Javítva az alacsony töltöttségi szint jelzése.
- Az érzékelő kiegyensúlyozatlanság kompenzátor algoritmusa korrigálásra került.
- Az első 3 („fekete”) szektor határai megváltoztak.
- Kisebb javítások.
- Algoritmus-javítás és hibajavítás.
- Az algoritmus további korrekciója.
- Pinpointer átírva.
- Kisebb módosítások.
- A menün "HW opciók" almenü kész "Tekercsegyensúly...", és 3 pont van benne:
"Egyensúly"- a dolgok jelenlegi állása és a kártérítés
"Kívánt egyenleg"- milyen egyensúlyt szeretnél elérni?
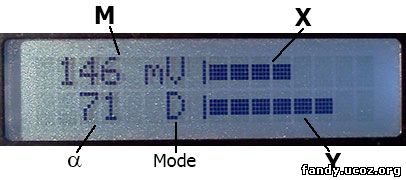
"nincs kompenzátor"- az érzékelő egyensúlya kikapcsolt kompenzátor mellettMind a 3 pont képernyője azonos, és a második sorban lévő betűben különbözik - "B" - "Egyensúly" "D" - "Kívánt egyenleg" "N" - "Nincs kompenzátor." Ezenkívül a kompenzáció kiválasztásakor a levél "A" , és amikor a kiválasztás befejeződött, egy felkiáltójel rövid időre megjelenik.
A képernyő grafikusan megjeleníti az X (felső vonal) és Y (alsó vonal) kiegyensúlyozatlanságvektor vetületeit, valamint a kiegyensúlyozatlanság tartományát millivoltban (felső sor) és az aszimmetriavektor szögét fokban (alsó sor) numerikus formában. . "nincs kompenzátor" maga az érzékelő konfigurálására szolgál a gyártási folyamat során.
"Kívánt egyenleg"- a kívánt egyensúlytalanság be van állítva. Módosítsa az X értéket a "Jobbra"/"Balra" gombokkal, az Y értéket pedig a "Fel"/"Le" gombokkal. "OK" gomb - kilépés mentéssel, "Esc" - mentés nélkül.
A menün "Egyensúly" Megjelenik az aktuális állapot, beleértve a kártérítést is. Bármelyik „Balra/Jobbra/Fel/Le” gomb megnyomásával elindul a kompenzáció kiválasztásának folyamata, hogy az eredmény a lehető legközelebb legyen a kívánthoz (a „Kívánt egyensúly” menüben beállítva). "OK" - kilépés az eredmény mentésével, "Esc" - kilépés mentés nélkül.

- 3 profil hozzáadva az aktuális beállítások mentéséhez/visszaállításához (A, B és C). A profilok kezdetben üresek, azaz alapértelmezett értékeket tartalmaznak. Használat: "Mentés" - az aktuális beállítások mentése a profilba, "Betöltés" - a beállítások betöltése a profilból.
- Algoritmus korrekció.
- A háttérvilágítás fényerejének beállítása helyreállt.
- A feszültségmérő állásait beállították. Ahol R21 hagyhat 3,3 ... 3,9 kOhm-ot, és R20 15 ... 20 kOhm-ra kell cserélni. A helyes értékek a menüben, a "HW opciók... -> Voltmérő" részben állíthatók be.
- Kisebb javítások.
- A magas frekvenciájú működéssel kapcsolatos problémákat kijavították.
- A hangerőszabályzó kikerült a menüből, a "Bal" gombbal lehet be- és kikapcsolni a háttérvilágítást.
- A maximális hangfrekvencia beállítása megtörtént.
- Kisebb javítások és fejlesztések.
- Folyamatos automatikus talajszabályozás hozzáadva. A menüből konfigurálható (GEB sebessége), 4 fokozata van - ki ("ki") és automatikus hangolási sebessége 1-től 3-ig. Az 1 a leglassabb automatikus hangolás, a 3 a leggyorsabb. Az 1-3 módban az aktuális földelési szög ugyanazon a helyen jelenik meg, ahol a tápfeszültség látható.
- Kisebb javítások.
Minden információ, amely a QUASAR fémdetektor saját kezű készítéséhez szükséges
kvazár egy szelektív IB fémdetektor fémfelismeréssel és közvetlen jelfeldolgozással. A Quasar VDI-skála 16 oszlopra oszlik, és az oszlopok bármelyikét eltávolíthatja a keresésből (maszkkal zárva), valamint többhangos hangjelzéssel. A legújabb firmware verziókban a Quasar működési frekvenciája akár 17 kHz is lehet, és a keresőtekercstől függ.
A Quasar fémdetektor áramköre átlagos bonyolultságú (az egyetlen hiányzó alkatrész az MCP3201, így már van fémdetektor áramkörés Quasar AVR ahol a mikrokontroller cseréjének köszönhetően ez a probléma is megszűnt). De a Quasar programozható mikrokontroller és tekercs jelenléte, mint bármely más szelektív fémdetektor esetében, nehézségeket okoz a rádióamatőrök számára. A Quasar gyártását fémdetektorok gyártásában tapasztalattal rendelkező emberek végzik. Általában a Quasar fémdetektor rendelkezik közepes nehézségi szint hogy magad készítetted.

 Töltse le a Quasar fémdetektor diagramját pdf formátumban —
Töltse le a Quasar fémdetektor diagramját pdf formátumban —
A hozzáférhető képernyő jelenléte a Quasart nagyon kényelmes és könnyen megismételhető fémdetektorrá teszi fémfelismeréssel.
A fémdetektor működő képernyőjeKVAZÁR alábbiak szerint:
 Fémdetektor diszkriminációs skálaKVAZÁR a következőképpen osztva:
Fémdetektor diszkriminációs skálaKVAZÁR a következőképpen osztva:

A KVASAR fémdetektor 6 gombbal vezérelhető:
- SW1"Fel / Barrier+ / Autotune"
- SW2"Belépés / OK / Föld egyensúly"
- SW3"Jobbra (+) / PinPointer"
- SW4"Bal (-) / Háttérvilágítás"
- SW5"Menü/Esc"
- SW6"Down/Barrier-/Autotune"

Firmware a Quasar fémdetektorhoz 1.4.5-ös verzió (a mai legújabb firmware-verzió) –
A Quasar fémdetektor mikrokontrollerének villogtatásához, programozási biztosítékokat az alábbiak szerint kell elhelyezni:

Tekercs készítése a KVASAR fémdetektorhoz
A Quasar fémdetektor fejlesztője röviden ismerteti az általa készített keresőtekercset. DD típusú tekercs 230 mm külső átmérővel. TX – 40-45 fordulat 0,5 mm-es vezetékkel és RX – 200 fordulat 0,2 mm-es vezetékkel. A TX tekercs soros rezonanciás fémdetektorral van összekötve, a kondenzátor kapacitása 0,3 mF, a rezonanciafrekvencia 8,192 kHz, az RX tekercs párhuzamos rezonanciájú fémdetektorral van összekötve, és 1,5-es frekvenciára van beállítva. 2 kHz-cel a TX rezonancia frekvencia alatt.
Alább diagram egy ilyen tekercs Quasar fémdetektorhoz való csatlakoztatásához

A KVASAR fémdetektor oszcillogramos indításának és beállításának leírása -
A Quasar fémdetektor menüjének és beállításainak leírása -
Következtetés: A QUASAR fémdetektor egyszerű áramkörrel és olcsó alkatrészekkel (mikrokontroller, képernyő stb.) rendelkezik, ami nagyon vonzóvá teszi az önálló gyártáshoz. Működés közben a Quasar meglehetősen kellemes tulajdonságokat és jó eredményeket mutat, és könnyedén felveszi a versenyt a belépő szintű fémdetektorokkal.
A fémdetektor projekt folytatását és változatokban kapta meg KVAZÁRAVR, Ezért érdemes elkezdeni a fémdetektor ezen verzióinak gyártását, mivel a szerző leállította a QUASAR firmware-frissítéseinek kiadását!
Az írás során a szerző webhelyéről származó anyagokat használták fel - http://fandy.ucoz.org/
A Quasar fémdetektorral kapcsolatos összes kérdést felteheti a cikk megjegyzéseiben. És írja meg véleményét, kívánságait és javaslatait az anyag kiegészítésére.









